

O (futuro) veículo de exploração andou pela parte mais rochosa do deserto do Sahara, com o objetivo de afinar as suas capacidades de autonomia para as vindouras explorações a Marte.
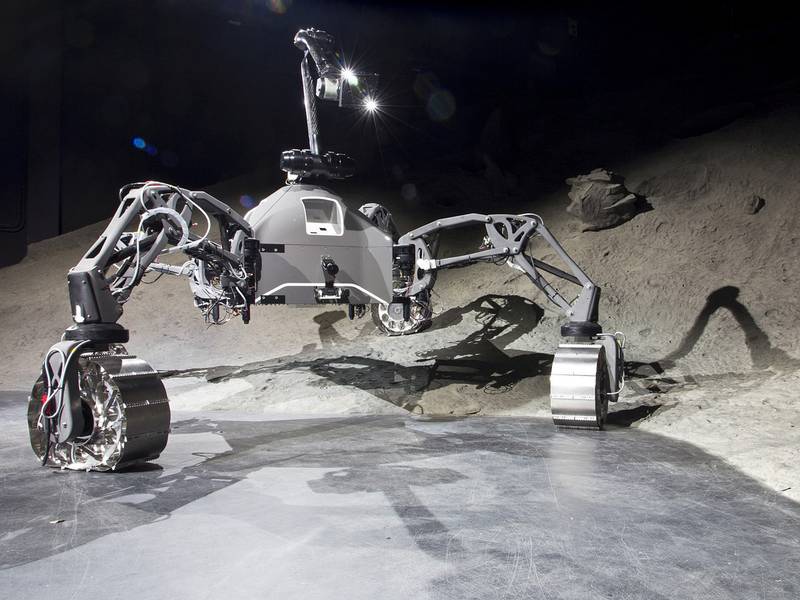
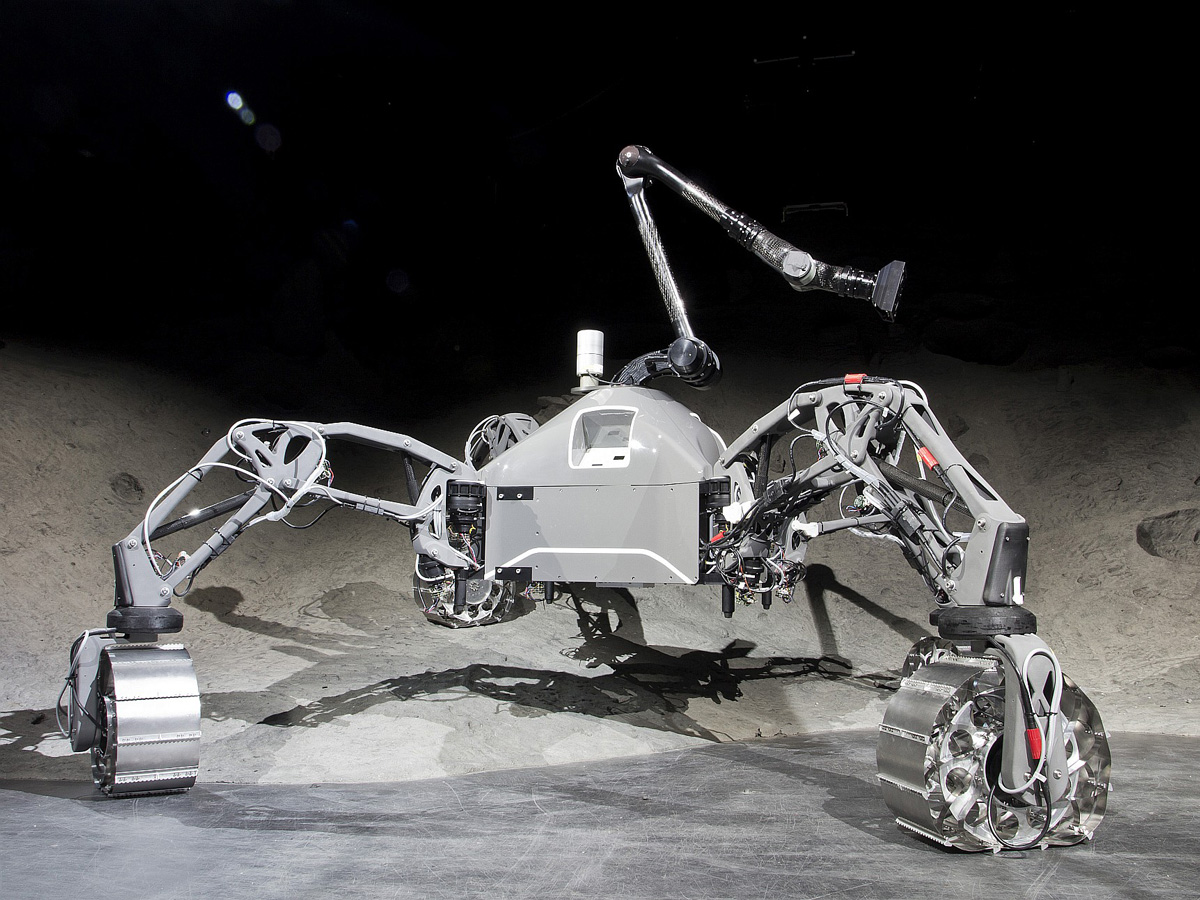
Com 2,4x2,4 metros e cerca de 150Kgs de peso, o Sherpa TT neste momento recebe, processa e executa ordens do tipo das que receberá quando estiver de facto no planeta vermelho, nomeadamente a captação programada de imagens e a recolha de objetos mediante com o seu braço articulado.
A intenção é que o veículo tipo "aranha", criado pelo centro alemão de robótica DFKI, num projeto financiado pela Comissão Europeia, seja capaz de “decidir” organizando as tarefas pedidas e controlando o tempo necessário para as terminar, além de saber desviar-se dos obstáculos no seu caminho. Isto porque só comunicará com a Terra em pequenas “janelas” diárias, numa comunicação condicionada pelos calculados tempos de latência de oito minutos.

Esta terça-feira andou por uma região do deserto do Saara escolhida “a dedo” por ser maioritariamente constituída por terreno rochoso, e logo mais semelhante à morfologia do solo marciano. Segundo avança a agência EFE, Terá percorrido 360 metros a receber ordens dos técnicos “em Terra”, simulando o que acontecerá quando estiver no planeta vermelho.
Quando chegar verdadeiramente a Marte - o que deverá acontecer num prazo de cerca de 10 ans – é provável que já não seja como o Sherpa TT é hoje. O objetivo dos seus criadores é que evolua graças às simulações, como a que decorreu agora no deserto do Saara, em Marrocos, ou como já tinham sido feita no deserto do Utah, nos Estados Unidos.
Pergunta do Dia
Veja também
Em destaque
-
Multimédia
Spot mostra que os robots também sabem dançar e seguir coreografias -
Site do dia
Lixo eletrónico está a aumentar a ritmo acelerado e este mapa mostra a situação em cada país -
App do dia
Home.Planet.Hunters convoca todos os guerreiros para defender o planeta depois de uma catástrofe -
How to TEK
Organize as janelas no Windows 11 para trabalhar em modo multitarefas
Comentários