

O projeto é da autoria de um grupo de estudantes suíços e inspira-se não apenas no movimento humano em ambientes de baixa gravidade, como a Lua, onde os passos dão lugar a projeções do corpo que parecem saltos. Mas também na técnica de movimento rápido de vários animais, que ao correm levantam as quatro patas do chão em simultâneo.
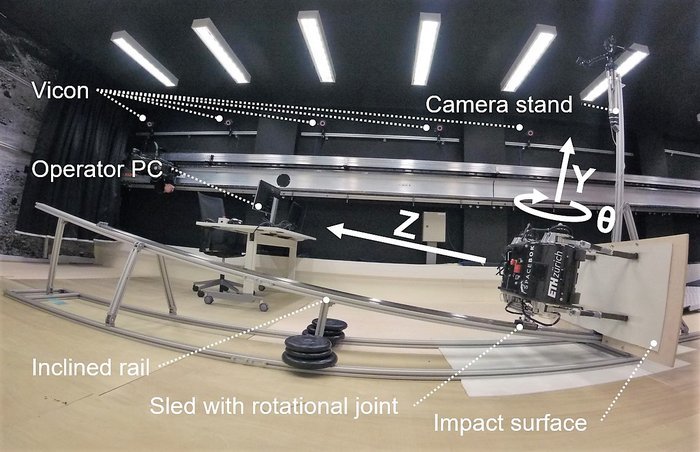
O robot chama-se SpaceBok e o objetivo é que venha a ser um novo aliado da exploração espacial. Os testes no centro da ESA na Holanda servem para aperfeiçoar a máquina e investigar o potencial deste “andar dinâmico” em ambientes de baixa gravidade, como a Lua, Marte ou mesmo asteróides.
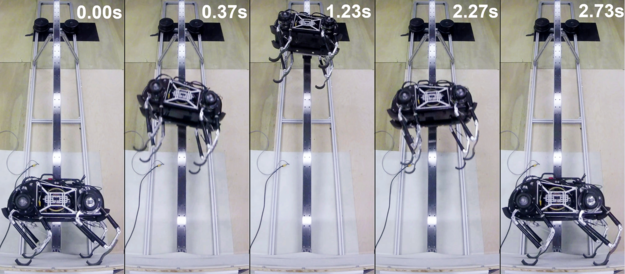
“Em vez de um andar estático, onde pelo menos três pernas permanecem no chão ao mesmo tempo, o andar dinâmico permite momentos de pleno voo durante os quais todas as pernas se mantêm fora do chão”, explica o estudante que lidera o projeto, Hendrik Kolvenbach.
O jovem sublinha ainda que até muito recentemente, por questões ligadas à capacidade computacional e aos algoritmos de controlo necessários, era um enorme desafio replicar o modo de andar mais eficiente de vários animais, num robot.
As investigações até à data permitiram já perceber que este modo “saltitão” pode tornar mais eficiente a missão de exploração espacial de um robot e mais fluida a caminhada. A primeira preocupação foi dar altitude a estes saltos, para melhorar a velocidade da marcha e atualmente o SpaceBok consegue saltar cerca de 1,3 metros num ambiente simulado de gravidade reduzida, um teto que se pretende ultrapassar.
Outro desafio atual, admitem os investigadores, é encontrar uma forma segura de fazê-lo voltar ao chão depois de cada salto e é nisso que a equipa tem estado também a trabalhar. Nesta fase, o SpaceBok “comporta-se como uma mini-nave espacial”, diz outro membro da equipa, Alexander Dietsche.
Para resolver o problema, os investigadores adaptaram um sistema que também é usado nos satélites para controlar a orientação, e colocaram-lhe uma roda de reação, que impulsiona e amortece o contacto com o solo.


O projeto também pretendia gerir o consumo de energia. O grupo queria criar um veículo mais eficiente a circular no espaço, que não fosse menos eficiente no consumo energético. O problema foi resolvido integrando molas nas pernas do robot, que armazenam energia quando este pousa e a libertam quando descola.
Pergunta do Dia
Veja também
Em destaque
-
App do dia
Uma infestação de zombies, muitas armas e diversão assegurada no Last War:Survival Game -
Site do dia
24me é um assistente pessoal online que quer ir além dos meros “lembretes” -
Montra TeK
7 smartphones modernos e apelativos abaixo dos 250 euros -
How to TEK
Organize os separadores do Chrome criando pastas temáticas
Comentários